




1.Bọt thủy dài
(Đặt độ vuông góc trục bọt thủy dài với trục đứng của máy)
1) Kiểm tra
- Đặt máy lên chân và tiến hành cân máy
- Quay máy đi 180 độ và kiểm tra xem bọt khí có nằm đúng tâm bọt thủy không
- Trường hợp bọt thủy nằm đúng vị trí, không cần hiệu chỉnh. Nếu khác đi, tiến hành hiệu chỉnh theo hướng dẫn.
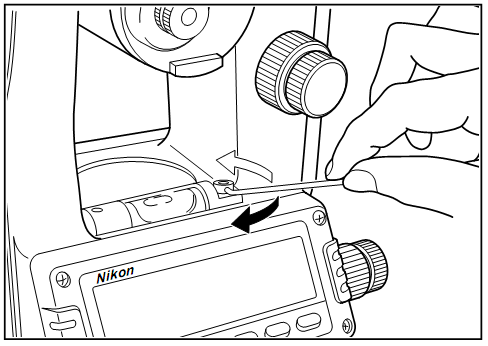
2) Hiệu chỉnh
- Quay vít chỉnh bọt thủy dài với tâm chính đã cung cấp kèm theo, đưa bọt khí dịch về tâm một nửa khoảng sai lệch
- Chỉnh tâm bọt khí bằng vít cân máy A
- Kiểm tra lại và hiệu chỉnh cho đến khi đạt kết quả
2. Bọt thủy tròn
Trước khi tiến hành cân bằng bọt thủy tròn, kiểm tra xem có sự sai lệch của bọt khí khỏi vòng chuẩn tâm trên bọt thủy. Trường hợp không có sự sai lệch, không cần hiệu chỉnh. Nếu có sai lệch, lấy tăm chỉnh dùng tay hiệu chỉnh ba vít hiệu chỉnh đưa bọt khí về tâm.
3.Kính dọi tâm
(Đặt thẳng hàng trục thấu kính theo phương dây dọi với trục đứng cảu thiết bị)
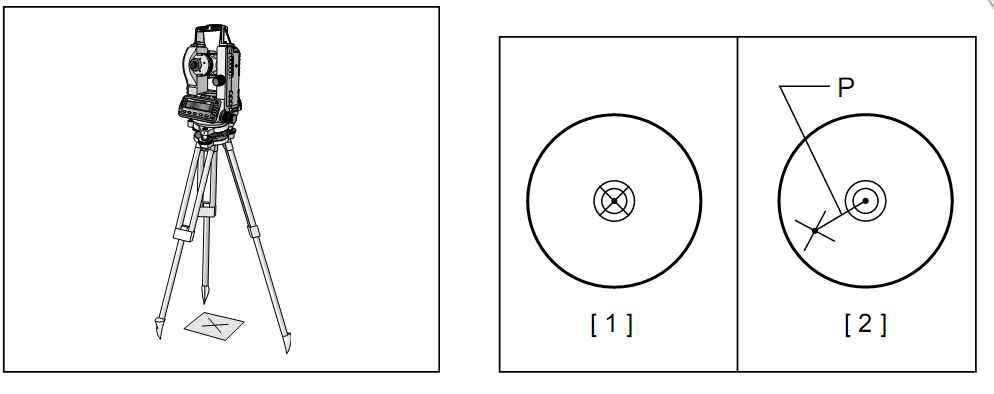
1) Kiểm tra
- Đăt thiết bị lên chân ( không cần cân bằng)
- Đặt tấm vạch dấu “X” xuống đất bên dưới thiết bị
- Nhìn vào kính dọi tâm, chỉnh vít cân máy đưa ảnh dấu “X” vào tâm vòng chuẩn
- Quay máy đi 180 độ
- Trường hợp dấu “X” nằm ở tâm lưới chỉ, không cần hiệu chỉnh. Trường hợp sai lệch, tiến hành hiệu chỉnh theo chỉ dẫn dưới đây.
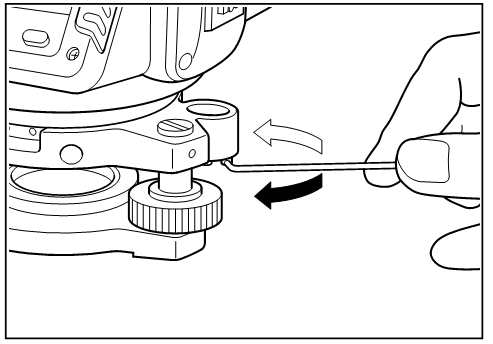
2) Hiệu chỉnh
- Dùng tuốc no vít đã cung cấp, quay vít chỉnh đưa dấu “X” đi nửa đoạn thẳng nối tâm với lưới chuẩn
- Lặp lại các bước kiểm tra
4. Sai số điểm 0 bàn độ đứng
1) Kiểm tra
- Đặt máy lên và cân máy
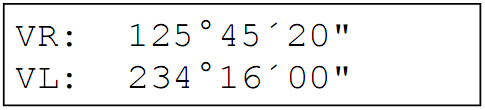
- Để ống kính ngắm về bên trái, chọn mục tiêu P tùy ý theo bàn độ ngang trong phạm vi 10 độ, và đọc giá trị góc đứng…VR
- Quay ngược ống kính về phía bên phải và đọc giá trị khác góc đứng…VL của mục tiêu P
- Khi VR+VL=360 độ/400G khi đặt thiên đỉnh 0 độ, hoặc khi VR+VL=180 độ/200G ( Hoặc 540 độ/600G) khi đặt ngang 0 độ, không cần hiệu chỉnh. Nếu sai khác thì phải tiến hành hiệu chỉnh theo hướng dẫn sau:
Sai số ngắm chuẩn phương đứng cho các góc nói trên (360 độ, 180 độ và 540 độ hoặc 400G, 200G và 600G), và liên quan tới hằng số trục đứng. Hằng số trục đứng là phần bù kép cho sai số điểm không. Chú ý rằng sai số du xích đối xứng không có quan hệ với hằng số trục đứng. Do đó, phải lấy giá trị đọc một trong hai phương thiên đỉnh 0 hoặc phương ngang 0 độ, và tiến hành kiểm tra sai số.
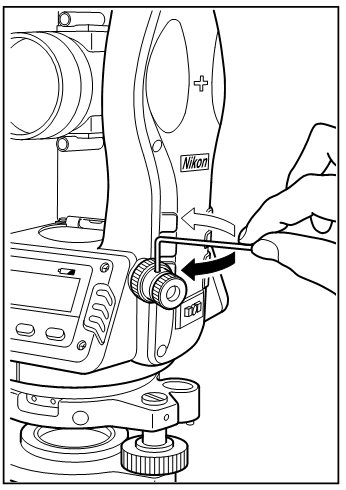
2) Hiệu chỉnh
- Trước khi đo, xem lại phương góc đứng 0 độ ở dạng cài đặt tham số ban đầu
- Góc đứng hiển thị như sau thiên đỉnh 0, bất chấp cài đặt ban đầu
- Hai kiểu sai số cố định trục đứng để đặt đóng hay tắt bật tự động bù trục đứng, và ấn định trong các mục cài đặt ban đầu cho máy
- Bù sai số điểm 0 là chức năng không tính đến bật cài đặt tự động bù trục đứng
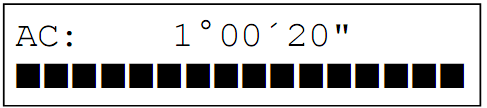
- Trong khi ấn phím ký hiệu bóng đèn, bật công tắc nguồn.
-Màn hình hiển thị sáng lên và giá trị hằng số trục đứng hiện thời được hiển thị.
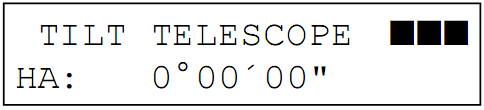
- Nghiêng ống kính qua phương ngang ở vị trí mặt trái để đọc giá trị góc đứng
-Góc đứng “VR” xuất hiện ở dòng trên màn hình tinh thể lỏng.
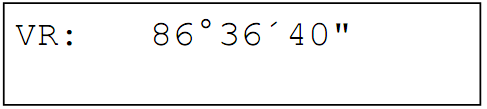
- Khi ở vị trí mặt trái, ngắm mục tiêu P tùy ý, nằm trong phạm vi 10 độ theo phương ngang.
-VR mang ra giá trị góc đứng của mục tiêu P
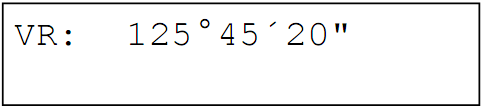
- Nhấn phím (HOLD) lưu giá trị VR vào bộ nhớ
-Giá trị VR lưu giữ hiển thị ở dòng phía bên mà hình tinh thể lỏng, đồng thời VL hiển thị ở dòng dưới.
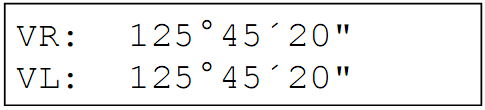
- Quay ống kính về vị trí mặt phải và ngắm lại mục tiêu P.
-Mục tiêu P có góc đứng hiển thị ở dòng dưới
- Nhấn phím (HOLD) lưu giá trị VL vào bộ nhớ
-Hằng số truc đứng hiển thị một giây trên cả 2 góc đứng mặt phải và trái là đưa vào
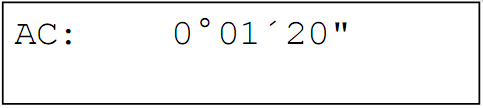
- Bù góc đứng được tính bằng một nửa hằng số trục đứng và ghi vào bộ nhớ.
- Nhấn phím khác bên cạnh phím (HOLD) là bỏ qua tiến hành hoạt động này
- Để tiếp tục đặt bù góc trục đứng đến giá trị tốt hơn, bật tắt nguồn.
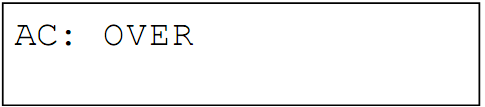
- Tiến hành hiệu chỉnh khi hằng số tự động trục đứng vượt quá 6′, thông báo “OVER” sẽ xuất hiện trên màn hình và điều khiển quay về bước 2
- Hằng số mới sửa sẽ được lưu giữ nguyên vẹn trong bộ nhớ thậm chí khi bật tắt nguồn. Tất cả đo góc đứng sau đó được sửa lại bằng AC mới.





